|
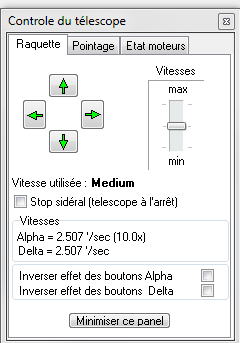
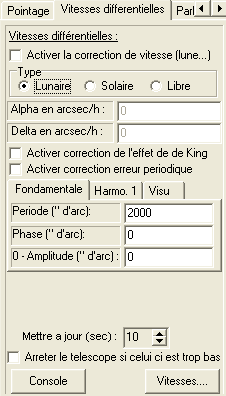
- Le panel de changement de vitesses différentielles est
utilisé afin d'imposer la vitesse de la monture. Certaines
monturespeuvent changer leur vitesse de suivi (par une commade
toute simple !) pour s'accorder sur la vitesse de La Lune ou celle
du Soleil. Il suffit alors de cocher le bouton correspondant et de
choisir le bouton radio désiré (avant ou après avoir coché le
changement de vitesse ...). La vitesse libre est programmée pour
correspondre à l'arrêt des moteurs.
Pour revenir à une vitesse de suivi sidérale, il suffit de décocher
la case de changement de vitesse. Un renseignement sur la durée de
changement de vitesse est fourni ... :
- La vitesse de King permet de faire varier la vitesse en
ascension droite pour satisfaire à la réfraction atmosphérique.
Pour de amples explications, on se reportera à la documentation sur MCMT II : "C'est quoi la vitesse
de KING".
- Pour utiliser les options sur l'erreur périodique présentées
par PRiSM, on se reportera à la documentation du MCMT II : "Réglage du PEC version
PRiSM V6". Pour désactiver ces corrections, il faut à nouveau
cocher sur la case correspondate.
- L'option "Arrêter si Télescope trop bas" doit être
cochée si on désire que le télescope s'arrête lorsque ce dernier
est trop bas par rapport à l'horizon lors d'un pointage automatique
... Cette option utilise la fonction STOP_ALL_Telescope (Arrêt
moteur). Comme PRiSM empêche de pointer sous une hauteur critique
(réglable au début depuis la configuration
dans l'onglet "Pointage Auto"), cette option n'a donc que peu
d'importance.
- Permet d'accéder à la fenêtre "CONSOLE" de la monture.
Cette partie est spécifique, accessible qu'à partir une connexion
par DLL et dépend de chaque monture.
- Permet d'accéder aux réglages des vitesses durant
l'observation. Cette partie est spécifique, accessible qu'à partir
une connexion par DLL et dépend de chaque monture.
|