Lancement : Menu [Télescope] > [Configuration]
Ce menu est utile pour déclarer à PRiSM la monture et les accessoires qui devront être pris en compte. La connexion pourra être établie après avoir complété ce menu ...
Ceci est le premier réglage proposé et concerne
les systèmes complets : ![]() . Lorsque qu'un
système est complété, PRiSM prévient l'utilisateur que les codeurs
et moteurs indépendants sont désactivés puisqu'intégrés au système
:
. Lorsque qu'un
système est complété, PRiSM prévient l'utilisateur que les codeurs
et moteurs indépendants sont désactivés puisqu'intégrés au système
:
En ce qui concerne le système "LX200", le focuser externe est lui aussi désactivé :
Trois systèmes complets sont accessibles :
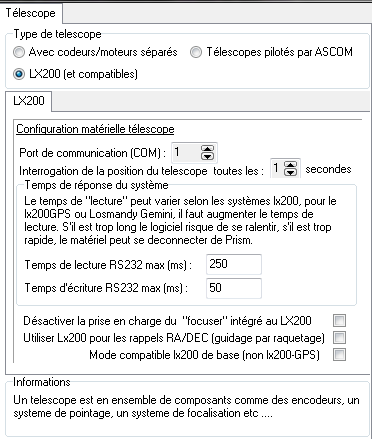
Le système LX200
:
|
|
|
| Le système ASCOM
:
Pour les sytèmes ASCOM, il faut cliquer sur le bouton radio "ASCOM Telescopes". Afin de choisir le type de télescope désiré, il est nécessaire que la plate-forme soit installée. L'installation doit se réaliser de la façon suivante :
Pour de plus amples renseignements sur l'installation de la plate forme ASCOM, aller à la page ici. 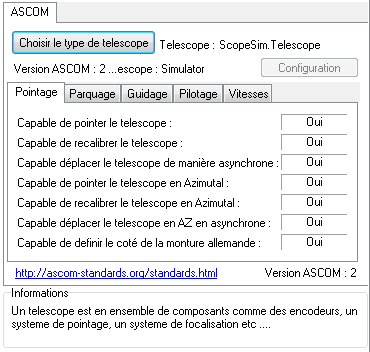
|
Il faut régler les propriétés du système. l'ensemble ne pourra être validé que si ces dernières ont été réglées : 
Ces propriétés dépendant du système utilisé, il est impossible de toutes les décrires ici. Cependant, toutes les propriétés possibles sont résumées ensuite dans les différents onglets proposés : |
|
|
|
|
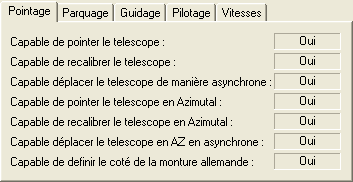
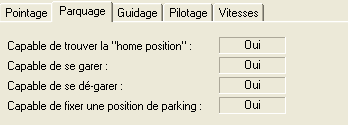
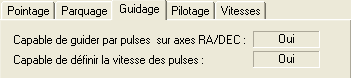
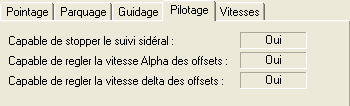
| Onglet décrivant les fonctions de pointages accéssibles | Onglet décrivant les actions possibles dans la raquette du télescope, onglet "Parking". | Onglet décrivant les possibilités d'autoguidage, notamment si l'autoguidage peut être réalisé sans utiliser les éventuels relais du boitier d'autoguidage. |
|
|
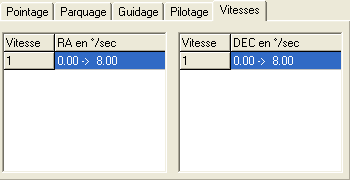
| La prise en charge de vitesses différentielles, retranscrite dans l'onglet "vitesses différentielles" de la raquette du télescope. | Le réglage des vitesses. |
Attention : suivant le type d'instrument et la version ASCOM supportée, toutes les fonctionnalités présentées ci-dessus ne sont pas nécessairement présente. Seules seront présentes les fonctionnalités avec un "Oui" comme indication !
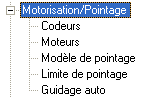
Afin que le panel de réglage Codeurs/Moteurs séparé apparaissent, il faut choisir dans "Type de télescope" : "Avec codeurs/moteurs séparés"
Dans le cas d'un système non complet (ou séparé en plusieurs parties), il faut déclarer les accessoires un par un :
Un petit apparté avant ....
La question que l'on peut se poser : pourquoi une
DLL dans certains cas ?
La réponse est plutôt simple : chaque appareil possède ses propres
spécificitées et il est très difficile d'intégrer les spécificitées
de chacun d'eux dans un panel de réglages généraux à tous les
appareils. Le programmeur de PRiSM ne pouvant posséder tous les
accessoires existants sur le marché (sûrement à son grand désespoir
!), il était donc nécessaire de créer un moyen afin que
l'utilisateur, qui possède normalement l'instrument sur place,
puisse, par lui-même, adapter son système au logiciel.
A l'heure actuelle, seuls les télescopes Meade LX200, MCMT et MCMT II sont parfaitement pris en compte par le logiciel. Certes, beaucoup de télescopes fonctionnent suivant ce principe (et d'ailleurs le "langage" LX200 a été dérivé et complété suivant les instruments). Cependant, ces instruments possèdent pour la plupart des spécificités qui ne sont pas nécessairement pris en compte ...
DLL = Dynamic Link Library. Ce terme peut faire peur mais le principe de la DLL reste simple : il s'agit d'une suite de fonction à compléter (ou non) permettant d'ordonner certaines commandes à la monture. Ces commandes sont imposées dans la documentation de la DLL mais elles doivent être intégralement complétées à l'intérieur de cette dernière. PRiSM viendra ensuite "piocher" à volonté les instructions qu'il a besoin suivant la demande de l'utilisateur ...
Suivant la philosophie du programmeur, il est
clairement séparé la notion de codeurs, de moteurs et de fonctions
GOTO pour les télescopes le permettant. Ceci permet d'ailleurs de
ne programmer qu'une partie de la DLL suivant que l'on veuille ne
tenir compte que de codeurs, que des moteurs voire du système
télescope en entier.
Pour chaque accessoire, une DLL de simulation est proposée pour
vérification du fonctionnement de la liaison.
Il faut choisir parmi la liste des codeurs proposés. Pour chacun, l'utilisateur doit compléter un minimum d'information avant d'établir la liaison.
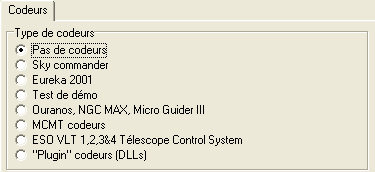
En ce qui concerne la prise des codeurs par DLL,
sont actuellement disponibles les codeurs correspondant aux
systèmes : MCMT II, codeurs Ouranos et T55 (Pic Du
Midi).
Les DLL correspondantes se situent dans le sous-répertoire
"Plugins/Telescope" du répertoire principal de PRiSM.
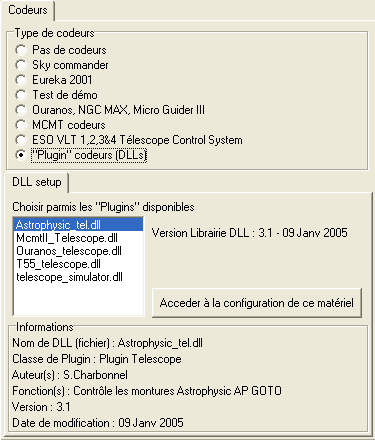
Il ne faut pas oublier de compléter le bouton [Accéder à la configuration de ce matériel]. Toutes ces DLL sont automatiquement mises à jour par internet lorsque cette dernière est acceptée.
Il faut choisir parmi la liste des moteurs proposés. Pour chacun, l'utilisateur doit compléter un minimum d'information avant d'établir la liaison.
En ce qui concerne la prise des moteurs par DLL,
sont actuellement disponibles les moteurs correspondant aux
systèmes : MCMT II et T55 (Pic Du Midi).
Les DLL correspondantes se situent dans le sous-répertoire
"Plugins/telescope" du répertoire principal de PRiSM.
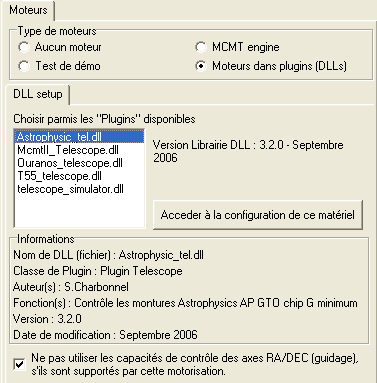
Il ne faut pas oublier de compléter le bouton
[Accéder à la configuration de ce
matériel] qui pour les mêmes systèmes mèneront aux mêmes
réglages que pour les codeurs! Toutes ces DLL sont automatiquement
mises à jour par internet lorsque cette dernière est acceptée.
POINT IMPORTANT :
Case à cocher [Ne pas utiliser les
capacités de contrôle des axes RA/DEC de la
motorisation] :
Cette case spécifie l'instrument qui va lancer les ordres
d'autoguidage : Soit les moteurs du télescope, soit les
relais de la caméra CCD :
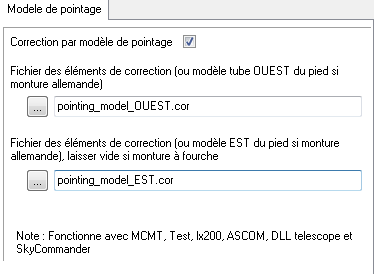
Si un modèle de pointage a été réalisé, il faut
l'intégrer au système utilisé AVANT d'établir la communication avec
ce dernier.
Pour cela, il faut cocher la case correspondante et fournir le
chemin complet du fichier de correction.
|
Si la monture est une monture allemande, il est nécessaire de saisir un modèle dans chacune des 2 cases afin qu'un modèle différent soit pris suivant le côté du tube par rapport à la monture. Par défaut, laisser vide le chemin du deuxième modèle si l'utilisateur ne veut prendre en compte qu'un seul modèle (monture à fourche, monture allemande dont le côté du tube par rapport à la monture n'est pas implémenté). A noter que ce fichier de correction fonctionne également avec tout système gouverné par la DLL. Pour obtenir ce fichier de correction, il faut le créer SANS correction à partir du menu "Telescope / Correction Codeurs".
|
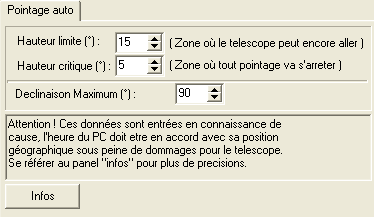
Cette partie est très importante car elle va donner les limites de pointages du système. En effet, en observation automatique géré par script, il nécessaire de préciser de telles données sous peine de voir son tube optique heurter quelque chose.
|
|
|
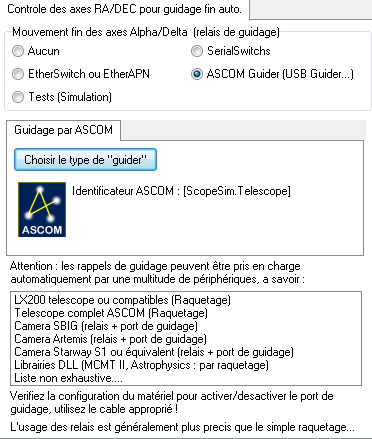
Défini un éventuel système utilisé pour le guidage automatique.
|
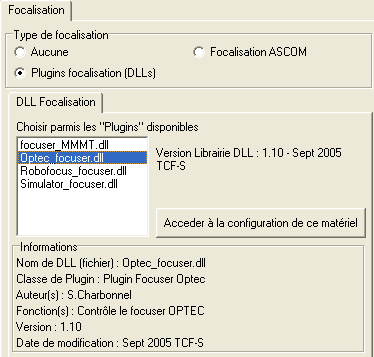
Ceci permet de configurer l'éventuel système de focalisation utilisé. Cette configuration peut aussi être utilisé avec un système complet LX200 à condition de déconnecter le système de focalisation du LX200 à la configuration (c.f. les systèmes).

Différentes configurations sont proposées :
|
En ce qui concerne la prise des moteurs par DLL,
sont actuellement disponibles les focusers correspondant aux
systèmes : MCMT II, OPTEC TCF-S et HOMEDOME
RoboFocus. |
|
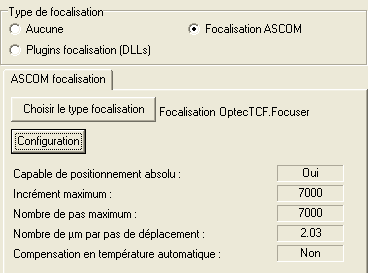
Il faut régler les propriétés du système.
l'ensemble ne pourra être validé que si ces dernières ont été
réglées. |
De façon générale, si une roue à filtre est déclarée, à l'intialisation du focuser, ce dernier va aller à sa position de référence et de plus, mettre la roue à filtre sur le filtre de référence. Ceci permet de régler la focalisation pour l'épaisseur de référence. Il est donc conseillé de bien remplir les parties de configuration de la roue à filtre si cette dernière est utilisée.
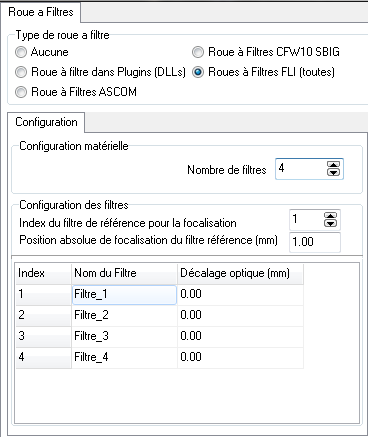
Ceci permet de configurer l'éventuel roue à filtres utilisée.
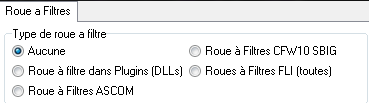
Plusieurs types de configuration sont proposées :
|
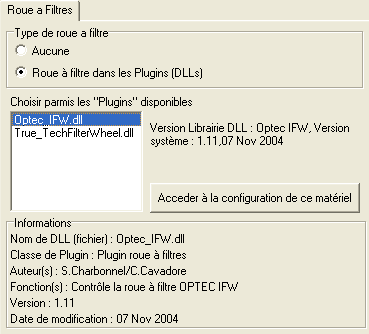
En ce qui concerne la prise des roues à filtres
par DLL, sont actuellement disponibles les roue à filtres
correspondant aux systèmes : True Technology et OPTEC IFW. |
|
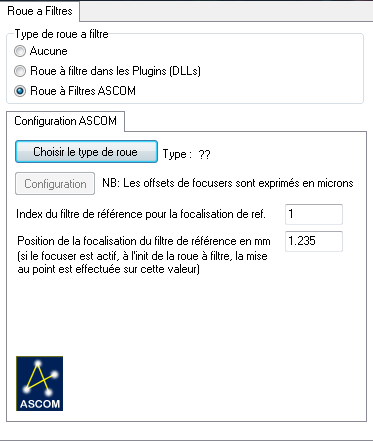
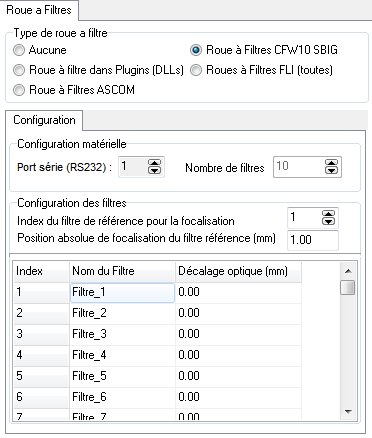
Il faut régler les propriétés du système. L'ensemble ne pourra être validé que si ces dernières ont été réglées. Ces propriétés dépendant du système utilisé, il est impossible de toutes les décrires ici. Comme stipulé ci-dessous, un minimum d'information est très important sur les filtres dans le but d'utiliser la focalisation automatique. Notamment, ces informations ne faisant pas partie du driver ASCOM, elles sont réglables indépendamment de ce dernier : le filtre de référence et la position de la focalisation lors de l'utilisation du filtre de référence. PRiSM fera le calcul lui-même pour les autres filtres, même si le filtre utilisé dès le départ n'est pas le filtre de référence. |
|
|
La roue à filtre est étroitement liée au focuser. Si les filtres n'ont pas la même épaisseur, la focalisation sera ajustée en fonction de ce qui est indiqué dans la configuration. On trouve dans la configuration des filtres un filtre de référence et une position de focalisation de référence. Si on utilise ce système, il faut savoir qu'à l'initialisation du focuser, ce dernier va aller sur cette position de référence, et mettre la roue a filtre sur le filtre de référence. Ensuite, lorsqu'on change de filtre, la focalisation se déplace pour compenser la différence d'épaisseur du filtre.
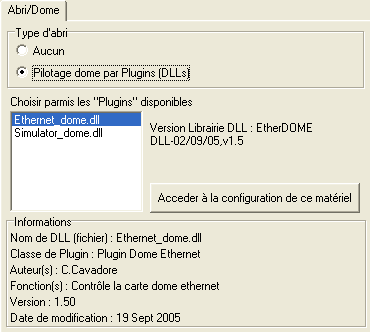
Ceci permet de configurer l'éventuel dome utilisé.

A l'heure actuelle, deux configurations sont proposée :
|
Est actuellement disponible par DLL le dome par
Ethernet. |
|
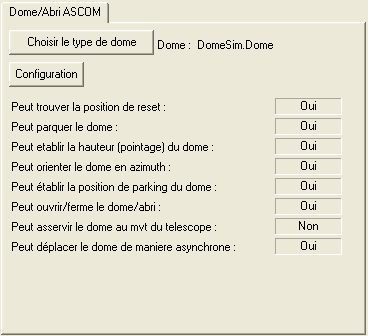
Il faut régler les propriétés du système.
L'ensemble ne pourra être validé que si ces dernières ont été
réglées. |
Ceci permet de configurer l'éventuel GPS utilisé. Cette partie a déja été abordée.
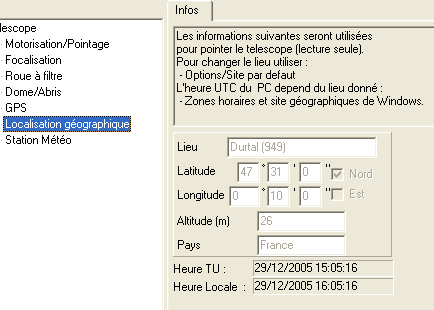
Cette fenêtre ne fait que reprendre les données remplies dans l'option "Site d'observation par défaut". En plus, il est fourni le temps local et universel.
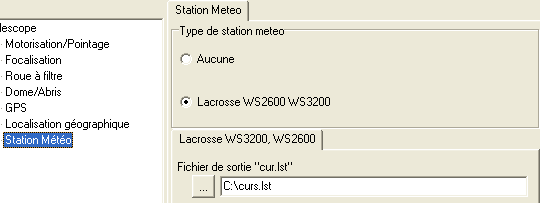
Les seules stations météos prises en compte dans PRiSM sont actuellement les stations Lacrosse Technology WS2600 et WS3200. Il est nécessaire de définir le chemin du fichier "CUR.LST", fichier où se trouvent les derniers relevés de température, pression et vent. Ces données seront intégrées dans l'entête de l'image CPA (onglet "Météo Extérieure").
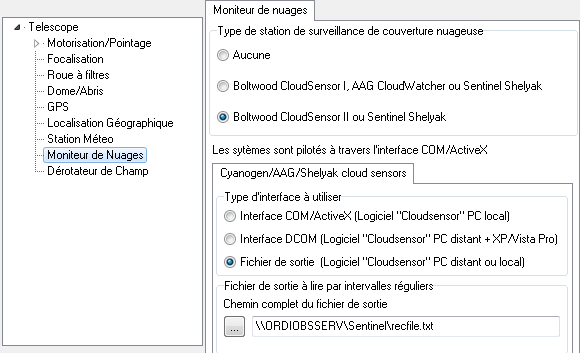
Seuls les moniteurs de nuages classiques sont pris en compte : soit en utilisant une connexion à distance sur un autre PC dont il faudra préciser l'adresse attribuée par le routeur (système ActiveX qui ne fonctionne que lorsque le moniteur est relié à une version windows PRO) et dans ce cas, l'utilisateur devra préciser l'adresse IP du PC, soit en lisant un fichier créé par le moniteur (éventuellement en réseau en partageant le répertoire auparavant).
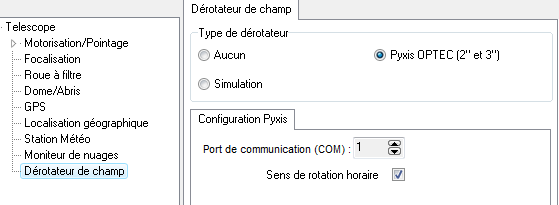
En dehors du dérotateur de simulation, seul le dérotateur PYXIS de chez la société OPTEC est pris en compte par PRiSM : Il faut juste préciser le port COM où est branché l'accessoire ainsi que le sens de rotation choisi pour ce dernier.
Voir aussi :
![]() Installer ASCOM sous
PRiSM
Installer ASCOM sous
PRiSM
Fonction(s) Script associée(s):
![]() Open_Telescope_Devices
Open_Telescope_Devices